







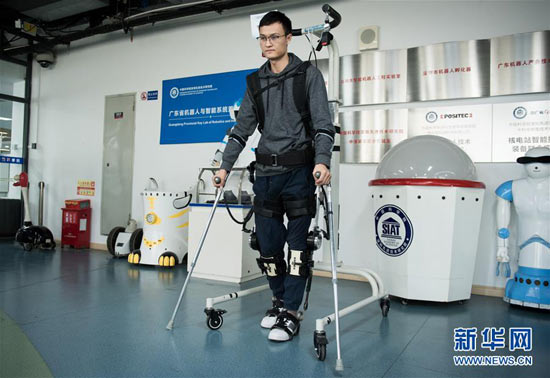
У 2012 годзе цэнтр інтэлектуальнай біёнікі Шэньчжэньской інстытута перадавых тэхналогій Акадэміі навук Кітая пачаў распрацоўку экзаскелетнага робата для ніжніх канечнасцяў. На сённяшні дзень ужо створана 6 мадэляў 4 разнавіднасцей і пададзена 38 патэнтавых заявак. Экзаскелетны робат-памочнік мацуецца на целе, прывад ў раёне тазасцёгнавых і каленных суставаў кіруе рухам сцёгнаў, дазваляючы хадзіць.
Аналізуючы паказанні датчыкаў, робат можа рацыянальна планаваць і паляпшаць хаду. У мэтах бяспекі ўстаноўлены абмежавальны і аварыйны выключальнікі. - Р -





 v
v  v
v  v
v